
GTJZ0607 Nożycowa platforma operacyjna





I. Przeglądy i funkcje produktów
Nowy wózek do robót lotniczych opracowany przez XCMG ma wysokość roboczą 7,8 m, szerokość 0,76 m, ładowność znamionową 230 kg, maksymalną długość platformy 2,6 m i maksymalne nachylenie 25%.Dzięki zwartej konstrukcji, zaawansowanym osiągom i kompletnym urządzeniom bezpieczeństwa, ciężarówka jest szczególnie odpowiednia do prac budowlanych.Ponadto.Jest wolny od jakichkolwiek zanieczyszczeń, płynnego podnoszenia i opuszczania, łatwy w obsłudze i konserwacji.Dlatego platforma ta jest szeroko stosowana w magazynach, fabrykach, na lotniskach i dworcach kolejowych, szczególnie w wąskich miejscach pracy.
[Zalety i funkcje]
●Wydajny i energooszczędny elektryczny układ napędowy charakteryzuje się zerową emisją i niskim poziomem hałasu, wraz z bezśladowymi oponami, co umożliwia tej maszynie łatwą pracę w zamkniętych środowiskach, takich jak budynki biurowe, szpitale i szkoły, minimalizując wpływ na środowisko.
● Aktywny mechanizm ochronny, taki jak mechanizm ochronny przed wybojami i samodzielnie opracowany system kontroli bezpieczeństwa, charakteryzują się humanizowanym projektem i bogatymi opcjami, spełniając potrzeby klientów w zakresie bezpieczeństwa, niezawodności i inteligencji.
●Konstrukcja o wąskiej strukturze umożliwia łatwe przejście całego pojazdu przez pojedynczą bramę;składane ogrodzenie może ułatwić transport
● „Zerowy promień skrętu” jest wyjątkowy i umożliwia maszynie pokonywanie zakrętów w wąskim pomieszczeniu.
●Maks.ładowność 230 kg, wiodąca w branży.
●Maksymalna prędkość jazdy 4 km/h i zdolność pokonywania wzniesień 25% ułatwiają jazdę.
II.Wprowadzenie części głównych
1. Podwozie
Główne konfiguracje: dwa koła skrętne, napęd 4×2, automatyczny układ hamulcowy, automatyczny system ochrony przed wybojami, bezśladowe opony z pełnej gumy i ręczne zwalnianie hamulca
(1) Maksymalna prędkość jazdy przy 4 km/h.
(2) Maksymalna zdolność pokonywania wzniesień przy 25%.
(3) Tylna część podwozia jest wyposażona w standardowy otwór do transportu wideł.
(3) System automatycznej ochrony dołu — zapewnia bezpieczeństwo podczas podnoszenia platformy
(4) Bezśladowe opony z pełnej gumy - duża ładowność, stabilna praca i przyjazne dla środowiska
(5) jazda 4×2;koła skrętne są jednocześnie kołami napędowymi;trzy biegi prędkości jazdy;dozwolone jest chodzenie na całej trasie;
(6) Układ automatycznego hamowania — maszyna hamuje, gdy przestaje się poruszać lub zatrzymuje się na zboczu;poza tym dodatkowy ręczny hamulec awaryjny;
2. Bum
(1) Pojedynczy cylinder wychylny + cztery zestawy wysięgnika typu nożycowego
(2) Stal o wysokiej wytrzymałości — wysięgnik jest lżejszy i bezpieczniejszy;
(3) Dopasowana wytrzymałość i sztywność — upewnij się, że wysięgnik jest niezawodny.
(4) Rama inspekcyjna — zapewnia bezpieczeństwo inspekcji
3. Platforma robocza
(1) Platforma główna może mieć ładowność do 230 kg, a platforma podrzędna do 115 kg.
(2) Długość platformy roboczej × szerokość: 1,88 m × 0,76 m;
(3) Podplatformę można wydłużyć o 0,9 m w jednym kierunku
(4) Drzwi platformy mogą być samoblokujące
(5) Poręcz pomostu można złożyć
4. Układ hydrauliczny
(1) Elementy hydrauliczne - pompa hydrauliczna, zawór główny, silnik hydrauliczny i hamulec są wykonane przez znanych krajowych (lub międzynarodowych) producentów.
(2) Układ hydrauliczny jest napędzany przez napędzaną silnikiem pompę zębatą, realizując w ten sposób podnoszenie i opuszczanie platformy oraz prowadzenie i sterowanie platformą.
(3) Cylinder podnoszący jest wyposażony w zawór awaryjnego opuszczania, aby zapewnić, że platforma może się schować ze stabilną prędkością, nawet w przypadku wypadku lub awarii zasilania.
(4) Cylinder podnoszący jest wyposażony w blokadę hydrauliczną, aby platforma robocza mogła niezawodnie utrzymać wysokość po zerwaniu przewodu hydraulicznego.
5. Instalacja elektryczna
(1) Układ elektryczny wykorzystuje technologię sterowania magistralą CAN.Podwozie wyposażone jest w sterownik, a platforma w uchwyt sterujący.Komunikacja pomiędzy podwoziem a sterownikiem platformy realizowana jest poprzez magistralę CAN, tak aby sterować pracą maszyny.
(2) Technologia sterowania proporcjonalnego sprawia, że każde działanie jest stabilne.
(3) Układ elektryczny steruje wszystkimi ruchami, w tym kierowaniem w lewo/prawo, jazdą przód/tył, przełączaniem wysokiej/niskiej prędkości i podnoszeniem platformy roboczej.
(4) Wiele metod bezpieczeństwa i ostrzegania: ochrona przed przechyleniem;blokada klamki;automatyczna ochrona przed dziurami;automatyczna ochrona przy niskiej prędkości na dużej wysokości;trzysekundowa przerwa w opadaniu;system ostrzegania o dużym obciążeniu (opcja);system ochrony ładowania;przycisk awaryjny;brzęczyk akcji, migające światło falownika, klakson, timer i system diagnostyki błędów.
III.Konfiguracja głównych elementów
| S/N | Kluczowy składnik | Ilość | Marka | Notatka |
| 1 | Kontroler | 1 | Hirschmann/Dolina Północna | |
| 2 | Pompa główna | 1 | Sant/Bucher | |
| 3 | Silnik hydrauliczny | 2 | Danfoss | |
| 4 | Hamulec hydrauliczny | 2 | Danfoss | |
| 5 | Jednostka mocy | 1 | Bucher/GERI | |
| 6 | Cylinder odstraszający | 1 | Dział hydrauliczny XCMG / Dacheng / Shengbang / Diaojiang | |
| 7 | Cylinder kierowniczy | 1 | ||
| 8 | Bateria | 4 | Trojan/Leoch | |
| 9 | Ładowarka | 1 | GPD | |
| 10 | Wyłącznik krańcowy | 2 | Honeywell/CNTD | |
| 11 | Przełącznik testowy | 2 | Honeywell/CNTD | |
| 12 | Napęd | 1 | Curtisa | |
| 13 | Opona | 4 | Exmile/Topower | |
| 14 | Czujnik kąta | 1 | Honeywell | Opcjonalny |
| 15 | Czujnik ciśnienia | 1 | Danfoss | Opcjonalny |
IV.Tabela głównych parametrów technicznych
| Przedmiot | Jednostka | Parametr | Dopuszczalna tolerancja | ||
| Wymiar maszyny | Długość (bez drabiny) | mm | 1882 (1665) | ±0,5% | |
| Szerokość | mm | 760 | |||
| Wysokość (platforma złożona) | mm | 2148(1770) | |||
| Rozstaw osi | mm | 1360 | ±0,5% | ||
| Cieżarówka | mm | 660 | ±0,5% | ||
| Minimalny prześwit pod pojazdem (podnoszenie/opuszczanie osłony dołu) | mm | 60/20 | ±5% | ||
| Wymiary platformy roboczej | Długość | mm | 1655 | ±0,5% | |
| Szerokość | mm | 740 | |||
| Wysokość | mm | 1226 | |||
| Długość przedłużenia platformy pomocniczej | mm | 900 | |||
| Środkowa pozycja maszyny | Pozioma odległość do przedniego wału | mm | 750 | ±0,5% | |
| Wysokość środka ciężkości | mm | 570 | |||
| Masa całkowita maszyny | kg | 1520 | ±3% | ||
| Maks.wysokość platformy | m | 5.8 | ±1% | ||
| min.wysokość platformy | m | 1.01 | ±1% | ||
| Maksymalna wysokość robocza | m | 7.8 | ±1% | ||
| Minimalny promień skrętu (koło wewnętrzne/koło zewnętrzne) | m | 0/1,75 | ±1% | ||
| Obciążenie znamionowe platformy roboczej | kg | 230 | — | ||
| Ładowność po wysunięciu platformy roboczej | kg | 115 | — | ||
| Czas podnoszenia platformy roboczej | s | 15-30 | — | ||
| Czas opuszczania platformy roboczej | s | 22-35 | — | ||
| Maks.prędkość jazdy w niskiej pozycji. | km/godz | ≥4 | — | ||
| Maks.prędkość jazdy na dużej wysokości | km/godz | ≥0,8 | — | ||
| Maksymalna zdolność pokonywania wzniesień | % | 25 | — | ||
| Kąt ostrzegawczy przechyłu (na bok/do przodu i do tyłu) | ° | 1,5/3 | |||
| Silnik podnoszący / jezdny | Model | — | — | — | |
| Moc znamionowa | kW | 3.3 | — | ||
| Producent | — | — | — | ||
| Bateria | Model | — | T105/DT106 | — | |
| Napięcie | v | 24 | — | ||
| Pojemność | Ah | 225 | — | ||
| Producent | — | Trojan/Leoch | — | ||
| Modele opon | — | Bezśladowy i solidny /305×100 | — | ||
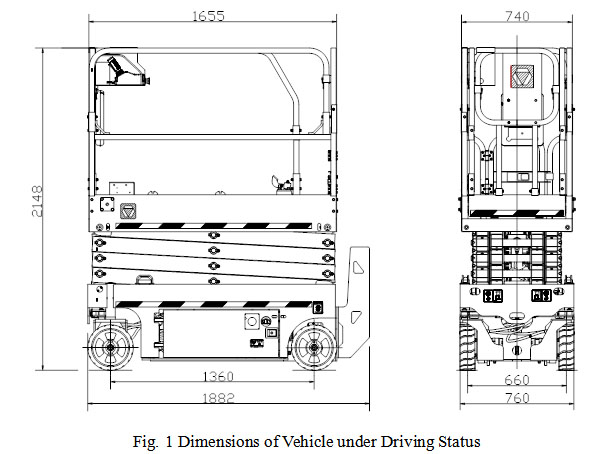
V. Schemat wymiarowy pojazdu w stanie jazdy
Załącznik: opcjonalne konfiguracje
(1) System ostrzegania o obciążeniu
(2) Lampa robocza platformy
(3) Podłączony do przewodu powietrznego platformy roboczej
(4) Podłączony do zasilania AC platformy roboczej



